「今話題のROS」って言われても、「そんな言葉聞いたこともない」って人の方が多いですよね。私も今回の体験をするまでは全く見たことも聞いたこともありませんでした。そもそも、何て読むのかも知らなかったくらいです。
なので「今話題」って言っても、一般社会では全く知られていないものですが、実はロボット制御開発の分野では非常に重要な役割を担う技術なんです。
「今話題」と言えば、最近では目まぐるしい進化で私たちの生活の中でも目にする機会も増えてきましたね。店先で見かけるPepper君や家庭用お掃除ロボットのルンバなど、私たちの身近な場所でも毎日ロボットは活躍していますもんね。
そう思うとちょっとは興味が沸いてきた人もいるのではないでしょうか。今回はその“注目”のロボット制御開発技術を、プログラミング初心者の私が体験してみました。
、、、っと、実際の体験記に入る前に、まずは簡単にROSについて説明しますね。
ただ「オペレーティングシステム(OS)」という名前ですが、私たちが日ごろ使っているWindowsやiOSとはちょっと違い、既存のOSの上で動く「ミドルウェアやソフトウェア」の一種になります。
このROSという技術、一言でいうと「オープンソースの開発用ツールやライブラリ(※1)が含まれたロボット開発用のプラットフォーム」で、オープンソース(※2)なので全世界に無料で公開されており、今まで蓄積されたノウハウを誰でも使うことができるという素晴らしい利点があるのが特徴です。
そのお陰でロボット開発のスピードが飛躍的に発展し、今ではなくてはならない注目の技術となっているんです。
今回はこの注目の「ROS」を“初心者でも学習できるのか”をテーマに体験記をご紹介します。なにぶん初心者の体験なので至らぬ部分もあるかと思いますが、そこはご愛嬌ということで、、、
※1 ライブラリ=開発を行う上で汎用性の高いプログラムをひとまとめにしたもの
※2 オープンソース=一般に無償で公開されているプログラムソース
学習教材ロボット“ともット アロワン”とは
さて難しい話はこれくらいにして、この注目のROS技術、オープンソースでライブラリ化されているといわれても、普通の人が英会話でも習うようなスタンスで習得できるものではないはず。
でも今後発展すること間違いなしのロボット制御開発の分野で注目の技術と言われれば、「将来のために勉強をしてみたい!」ってちょっと思いませんか。私だってゆくゆくはROSを習得して「将来有望なロボット産業に転職??」なんて野望を持ってしまうかも。
なんてかなりハードル高めのROS技術ですが、今回の学習教材ロボットならプログラミングが出来なくてもROSが体験できるということなので、㈱日本ビジネスデータープロセシングセンター(略称:日本データー)さんのご協力のもと、物は試しでチャレンジしてみることにしました。
この「TOMOT-Aro1」には初心者でも抵抗なく学習できるように「入門ガイド」がついており、すでに「ROS環境が構築」されているので開封してすぐに学習することができる親切設定。
また一番の注目は「プログラミングやロボット工学になじみがなくても安心して学習ができます」とホームページ(https://tomot.site)に書いてありました。
うん、それなら私にもできるかもしれない!!そのような淡い期待を抱きいざチャレンジです!
開封の儀

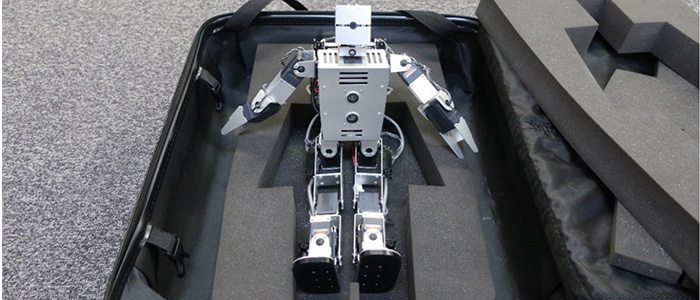
いよいよ初対面です。日本データーさんにお借りしたTOMOT-Aro1はキャリーバックに入ってやってきました。
※実際にご購入された際は、専用箱で届くようです。
こんにちわ、お世話になります。
挨拶もそこそこに、さっそくTOMOT-Aro1を見せていただくことにしました。
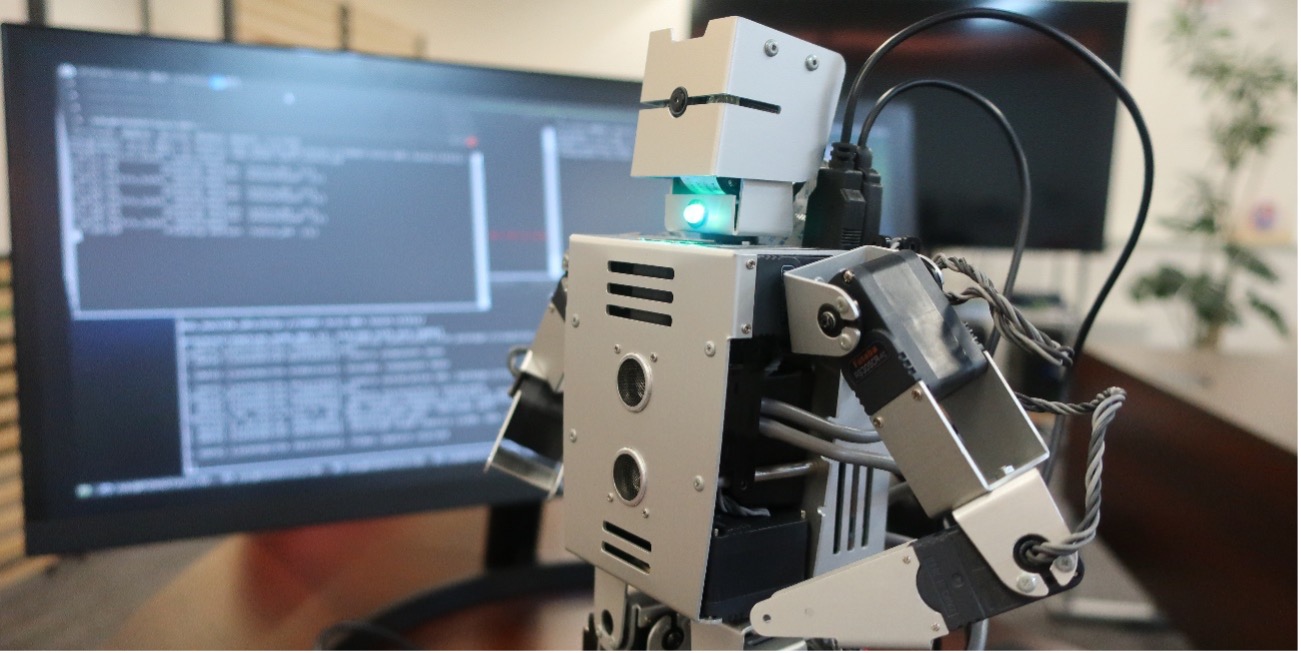
キャリーバックをあけてみると、衝撃吸収材で囲われたTOMOT-Aro1が出現です。ロボットというので重厚感のあるイメージを抱いていましたが、思ったよりも小さくて軽いので良い意味でちょっと意外でした。
腕や膝、足首など、人間の関節に当たるところは動くように作られているので、かなり自由度の高い動きが再現できそうです。
なんか楽しそう・・・
TOMOT-Aro1を実際に見て、ちょっとテンションが上がってきました。この超合金ばりの見た目はかなり好奇心を刺激します。興味津々です。
キャリーバックに入っていたTOMOT-Aro1と、その他の付属品ケーブル類や開発用の小型パソコンなどを一通り机にならべて内容を確認したら、いざ通電です!
通電の儀
TOMOT-Aro1を最初起動するには、電源ケーブル、USBのマウス、キーボード、ディスプレイを接続して行います。
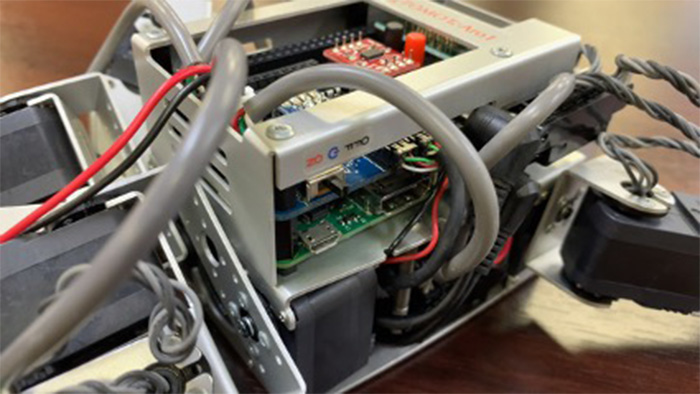
TOMOT-Aro1の本体には、超小型のマザーボードが搭載されているのですが、各ケーブルの挿し口が近接しておりケーブルの抜き差しはなかなかの繊細な作業になります。
ボディの隙間からマザーボードの基盤が見えているので、間違って基盤を傷つけてしまわないか、力を入れすぎて壊してしまわないか、とだいぶ慎重になりました。
やっさもっさと一通りケーブルを挿し終えて、いざ給電。背中にあるスイッチを「ON」に、、、
おっ、TOMOT-Aro1が立ち上がろうとしています。っが、ディスプレイ用のHDMIケーブルが邪魔をしてバランスが崩れてしまいました。
「おっと」とっさに手を添えたので転倒には至りませんでしたが、危ないところでしたね。
どうもディスプレイ用のHDMIケーブルは、TOMOTが起動してから差し込んだ方が良いようですね。太くて重さがあり硬いケーブルなので引っ張られてバランスを崩してしまいやすいみたいです。
※現在の製品版は改良され、HDMIケーブルを挿した状態での起動に影響しなくなっているようです。
さて危機を免れ何とか起立姿勢になったTOMOT-Aro1、いざプログラミング準備です。
TOMOT-Aro1始動

まずはデモンストレーションを見せていただきました。
ディスプレイに「Ubuntu MATE (ウブントゥ マテ)」という文字が表示されています。Linuxベースのデスクトップ環境のようですが、詳しくはまたの機会として、あまり気にせず進めて行きます。
ではTOMOT-Aro1を制御する環境づくりに進んでいきます。
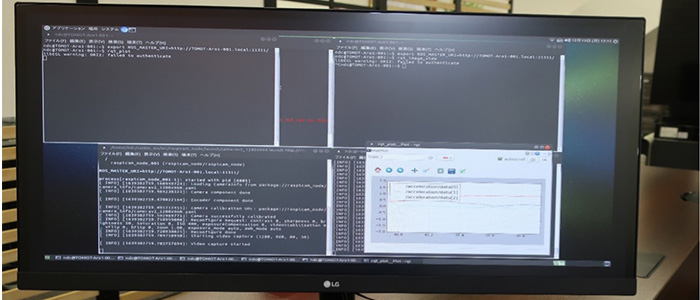
むむむ、、、コマンドラインの画面を立ち上げました。やはりプログラミング学習というだけあって、制御はコマンドで行うようですね。
コマンドラインって最初は取っつきにくく、黒い画面に白い文字で表示されているのを見るとエラー画面を連想してしまい、どうして良いのか分からなくなってしまいがちです。
でもTOMOT-Aro1は「プログラミングやロボット工学になじみがなくても安心して学習ができます」と言っているだけあって、履歴や文字の推測からコマンドを打てるように工夫されていましたので、初心者にも安心です。
まずはROSで開発を行うために、動作の基本となるプログラムを実行させておきます。TOMOT-Aro1に搭載されたカメラや、3軸加速センサー、距離センサーなど、動きを覚えさせるために必要なプログラムです。
ふむ、、、プログラミングするためにプログラムを起動させる??
このあたりはデモを見ている段階ではもう一つピンとこず、よく理解が出来ていなかったのですが、いざ自分で始動させる時になってやっと意味がわかりました。
ほんと何でもやってみないとわからないもんですね。
プログラム起動時の感想についてはもっといろいろあるのですが、そこを詳しく書いているとTOMOT-Aro1を動かすところまでたどり着けそうにないので、今回は省略したいと思います。
さぁ一通りの基本プログラムが起動し、TOMOT-Aro1の動作に移ります。
TOMOT-Aro1動く

デモストレーションでは、基本的な動作の覚えさせ方と、すでに保存されているプログラムを実施していただきました。
すでに保存されているデモプログラムには、ラジオ体操をしたり求愛ポーズしたりと、なかなかスムーズな動きでプログラミングされていました。
動きを作るときは、ラジオ体操のように明確な動きがあるものをまねて作るのがよさそうです。過去にチャレンジした学生さんの中には「日本舞踊」の動きをプログラミングした人もいたようです。
ならば、、、
「日本舞踊」と聞いて、真っ先に頭に浮かんだのは「パラパラを踊るTOMOT-Aro1って面白いんじゃない??」。
パラパラってご存じです?そうです、あの80年代後半から90年代のディスコブームに流行った、ユーロビートに合わせてみんなで同じ動きをする謎のダンスです。
もっぱら上半身だけの簡単な動きの組み合わせで、足は基本2ステップを踏むくらいなので、TOMOT-Aro1に覚えてもらうにはばっちりのような気がしています。
よし、目標はパラパラだ!
とそっと心で決意し、いざ自分たちでチャレンジです!
さぁ自分たちでチャレンジ
まずは、マニュアルを見ながらケーブルの接続から始めます。
ケーブルを慎重に挿して電源を入れて、モニターに表示させる。物理的な作業は問題なくできたのですが、いざコマンドラインを立ち上げて。
さて、何をすればよいのだろうか???
ついつい先走る心が、マニュアルにある黒窓に白文字のコマンドラインの説明箇所を読み飛ばして進めてしまい、どうするんだっけ???と固まっていると。
「マニュアルを見ながら順番に進めてください」って指摘されてしまいました。
ごめんなさい。本当にその通り、おっしゃる通りです、、、
さぁ心を入れ替え、仕切り直して準備を終え、いざモーションのプログラミングです。
まずは簡単な動きからチャレンジです。
モーションを覚えさせる時はTOMOT-Aro1を「半脱力状態」という、身体がぐにゃっと脱力した状態にさせてから行いますが、この状態にさせて半身を支えながらポージングさせて行くのは、なかなか難しい。
足の場所を決めても上半身がぐにゃっとのけぞってしまって、うまく自立するポーズになりません。
うーん、これでいっか
と、かなりアバウトなポージングで「Spaceキー」で確定。次のポージングは、大きく一歩を踏み出させたいと思い、右足を大きく前にスライドさせて「Spaceキー」で確定。
そんなことを数回繰り返し、作成したモーションを保存して再生してみることにしました。
ではいざローディング。
かなりアバウトなモーション登録だったのは自覚していたのですが、「それでも前に歩くくらいはするだろう」という甘い希望はすぐに打ち砕かれました。
一歩踏み出すごとに上半身がグラグラ。小さな歩みのときはそれでもバランスが取れていたのですが、最後の大股一歩のポージングがダメ出しとなり、見事TOMOT-Aro1を後ろにのけぞらせて、そのまま転倒させる羽目になってしまいました。
思ったよりもこれは難しい、、、
上半身と下半身のバランスを取りながら前進させるのは意外と難しいもので、二足歩行できる人間ってすごいんだなぁと変な関心をしながら、改めてチャレンジ!まだまだ無骨な動きですが、こけずに前に進むようにはなりました。
ちょっとこれって、すっごく面白いんじゃない?!
さいごに
モーションを付けるのはコツが必要で難しく、なかなか思うような動きにはならないのですが、動いたときの喜びが癖になって結構夢中になってしまいました。子供向けのブロックを使ったプログラミング教室が人気なのも納得です。
実際にTOMOT-Aro1を動かしてみて、最初に基本となるプログラムを実行させた意味や、モーションを数値として保存していく流れを身を持って体験することができました。
さて今回のお題の「本当に初心者でも学習できるのか」。
今回の体験記を読んで下さった皆さんはどう感じましたか?実際に体験した私としては「YES」ではないかと感じています。
物を作ったり組み立てたりが好きならば、この学習教材を使えばプログラミングの第一歩を楽しみながら踏み出せると感じました。
私も、なんとかTOMOT-Aro1にワンフレーズだけでもパラパラを躍らせることを夢見て、基礎の基礎からしっかりと学んでいきたいと思います。
